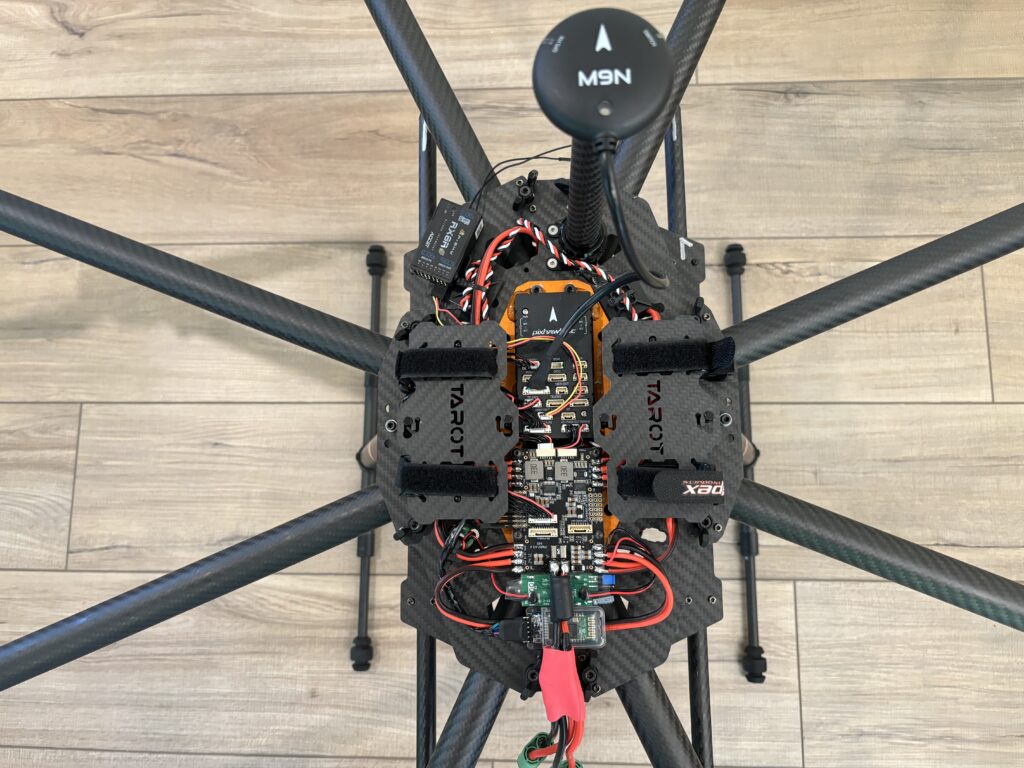
Octocopter build
Based on the Tarot T18 frame. The purpose of this build was to design a medium range (3-5 miles) UAV capable of delivering a payload of up to 20lbs. Built on a reliable Ardupilot flight controller executing an autonomous flight mission as well as payload delivery.




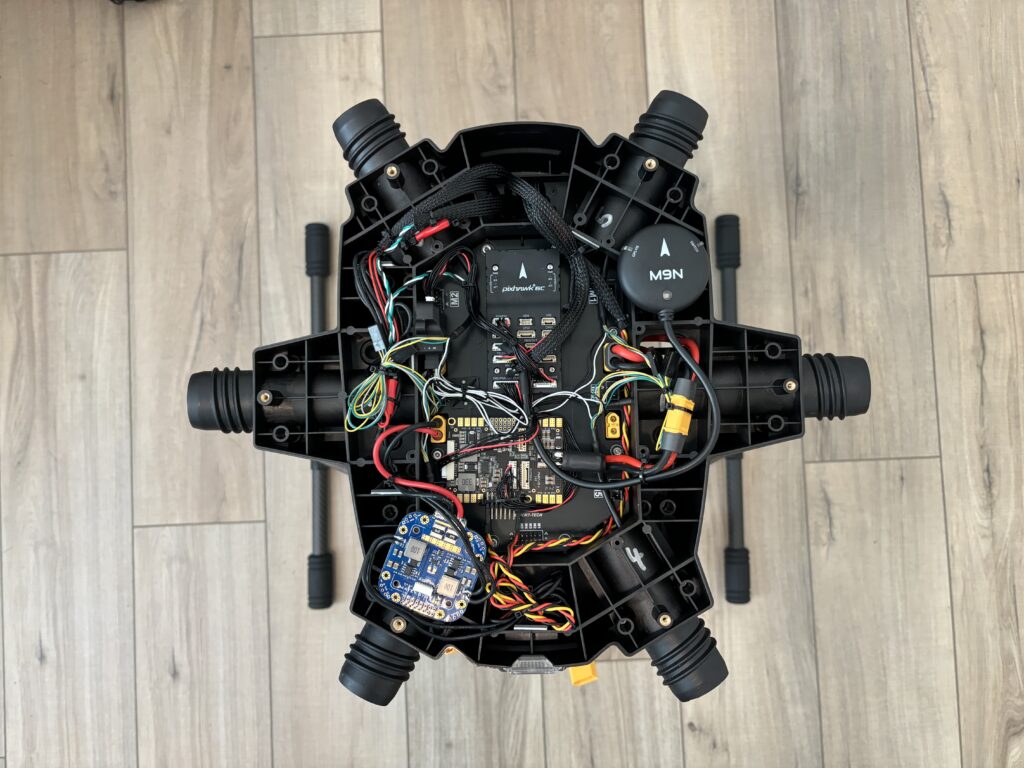
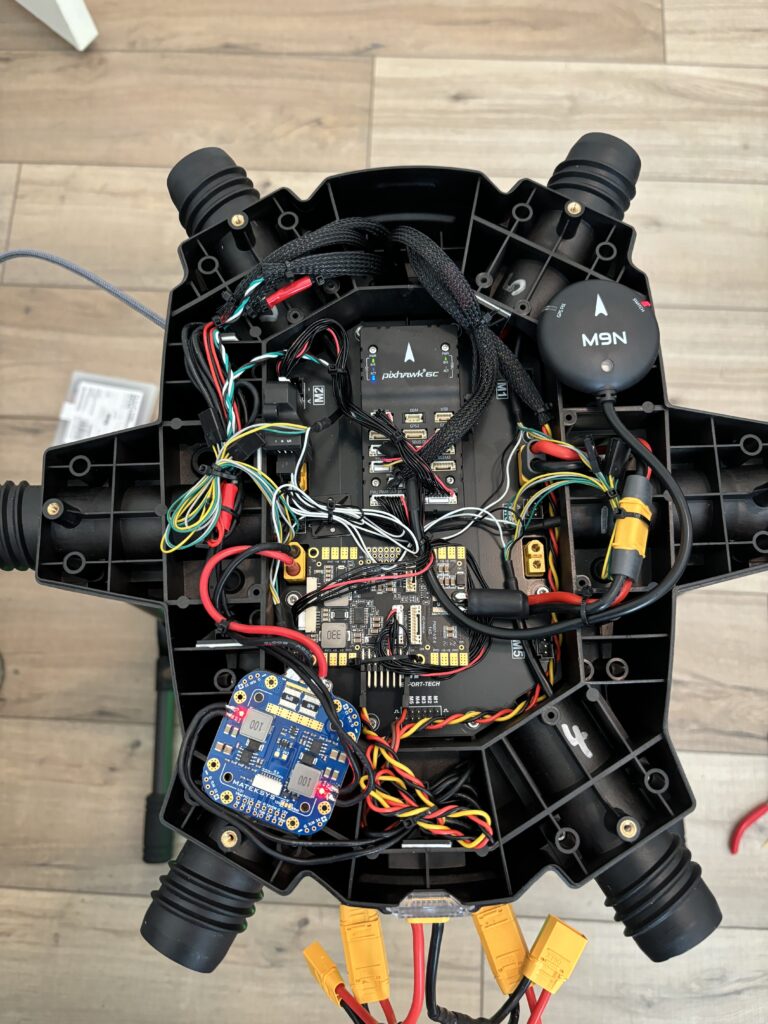
Hexacopter build
This particular build is based on the EFT X6120 frame. The customer requested that this build have a long range gimbal controlled camera and a controller / ground control station in a single unit. This called for a CubePilot Herelink HD Video Transmission System which offers a 2-in-1 controller/ground control station for easy way to change settings on a drone, plan missions, as well as interact with a video feed. An additional need for their use case was a payload delivery system in order to deliver goods to their customers.
This type of a system is very similar to a search and rescue type drone, except that in a search and rescue situation a higher resolution camera or even a thermal imaging camera may be a better fit.